Robots partícula con comportamiento individual estocástico exhiben como grupo un comportamiento emergente que es determinista.
|
Vemos en estos mismos días la noticia del primer ser vivo cuyas células se organizaron para nutrirse del tapete bacteriano sobre el limo de un mar somero y tranquilo de hace más de 2000 millones de años.
Posiblemente era un ser parecido a los mohos mucilaginosos, unos viejos conocidos de esta página por ser un buen ejemplo de grupo de organismos que cooperan para asegurarse la supervivencia de la colectividad, aunque sea a costa de la reproducción de algunos de sus individuos.
También hemos visto varias veces ejemplos de propiedades emergentes, propiedades que no están en cada uno de los entes, pero que aparecen en la colectividad a partir de la interacción entre los entes. Ejemplos típicos son los materiales magnéticos o los bancos de peces.
Un sistema magnético, se pueda o no calcular bien por la existencia de frustración, obedece a unas reglas precisas. Pero, los sistemas biológicos tienen muchas veces comportamientos a gran escala emergentes que pueden aparecer a partir de un movimiento estocástico (léase aleatorio) a pequeña escala de sus componentes elementales.
Por ejemplo, los agregados de células pueden migrar colectivamente durante la curación de una herida a partir del movimiento estocástico de las células que lo componen.
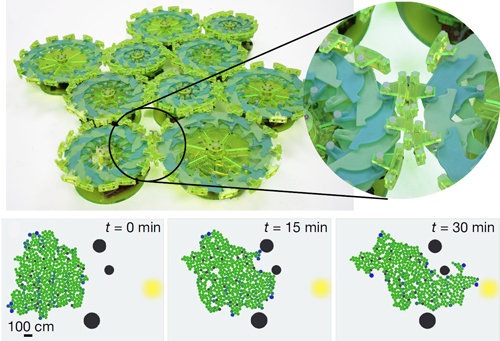
Así que un grupo de investigadores ha tratado de remedar este comportamiento inspirado en la Naturaleza usando pequeños robots en forma de disco. Los robots son independientes y oscilan al azar, pero pueden agruparse entre sí y exhibir un comportamiento colectivo que genere un movimiento de grupo coherente.
El resultado nos dice que la estocasticidad puede ser una aproximación al desarrollo de sistemas robóticos colectivos que exhiban un comportamiento determinista. Hay que fijarse bien en este detalle, pues nos dice que a partir del azar se obtiene determinismo, una predestinación.
En este caso, cada robot no se puede mover de forma independiente y no puede ser manipulado individualmente. Cada componente sólo puede oscilar individualmente a lo largo de su radio mediante contracciones y expansiones. El diámetro de estos robots partículas, como ellos los denominan, varía entre 15,5 y 23,5 cm durante esas oscilaciones.
Cuando no hay un estímulo externo el sistema se mueve al azar. Pero cuando son programados para ajustar su diámetro en respuesta a una variación de una señal ambiental entonces aparece un movimiento colectivo hacia la fuente de la señal, que en este caso es luminosa.
Shuguang Li (MIT) y sus colaboradores fabricaron agrupaciones de docenas de estos robots y, además, realizaron simulaciones en las que el sistema contaba con hasta 100 000 elementos.
Muestran que este tipo de sistema logra un movimiento robusto y evita los obstáculos que se le interponen. Este movimiento se mantiene incluso cuando el 20% de los robots no funciona bien, por lo que es muy robusto a fallos.
En estudios previos se consideraba que cada componente del sistema se movía independientemente respecto a los demás, podía ser manipulado individualmente y estaban sujetos a reglas deterministas. En general, necesitaban de algún control centralizado. Estos sistemas tenían, además una flexibilidad limitada y no se podían escalar bien.
En el sistema desarrollado por Li y sus colaboradores no se da estas situaciones. Nos dice que se pueden modelar ciertos sistemas colectivos sin necesidad de controlar cada componente, así que puede presentar ventajas frente a los sistemas previos. Además puede escalarse sin problemas añadiendo más unidades, algo que mejora el comportamiento.
Sin embargo, hay pegas. Si no hay un gradiente (una variación espacial) en la señal el sistema no se mueve hacia la misma. Además, necesita que la configuración inicial sea dispuesta manualmente. Tampoco se puede usar esta idea para tareas de autoensamblaje y auto-organización en geometrías complejas específicas debido a su propia naturaleza estocástica.
La otra limitación es que, de momento, el sistema está pensado para operar solamente en dos dimensiones y agregar una tercera dimensión requeriría de un nuevo hardware.
En la práctica los experimentos muestran que los grupos limitados en número de robots son lentos y grandes. Se necesitarían componentes más pequeños y rápidos, cosa que no parece difícil.
En el pasado se consiguieron enjambres de grandes cantidades de robots pequeños, tanto deterministas como estocásticos. A veces eran controlados remotamente por campos magnéticos, así como por una interacción también basada en el magnetismo. Para estos casos sí se conseguía autoensamblado.
Puestos a hablar de la aplicación futura de este tipo de idea, se ha especulado sobre su empleo en medicina. Una de las ideas sería el uso de enjambres de microrrobots de tamaño bacteriano que liberen un fármaco en un sitio en concreto dentro del organismo humano. Se guiarían siguiendo un determinado gradiente químico, como el pH, nivel de oxígeno, etc. No hace falta explicar que, de momento, se trata de ciencia ficción.
Copyleft: atribuir con enlace a htpps://neofronteras.com [1]
Fuentes y referencias:
Artículo original. [2]
Foto: Shuguang Li y colaboradores.