Insectos robot caminan sobre las aguas
|
|
|
A todos nos maravillaba de pequeños la extraña habilidad que ciertos insectos tenían de andar sobre el agua a pasmosa velocidad. Parecían casi ni tocar la superficie, y se nos antojaba que esta capacidad casi bíblica violaba las leyes de la Física. Después nos enteramos que, gracias a su pequeño tamaño, se valían precisamente de esas leyes de la Física para obrar tan tremendo milagro. La tensión superficial y el principio de Arquímedes eran suficientes.
Estos insectos casi no ponen una pata en el suelo en tierra firme en sus vidas, y sin embargo tampoco se sumergen, sólo se desplazan por la superficie de lagos, charcas e incluso mares sin romperla. Durante los últimos millones de años han optimizado la relación adecuada entre la tensión superficial y su peso de 0,01 gramos.
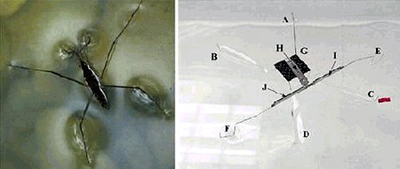
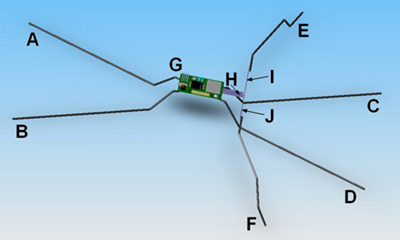
Ahora Yun Seong Song y Metin Sitti de Carnegie Mellon University han conseguido recrear esta habilidad usando insectos robots. El primer prototipo al igual que sus primos naturales no rompe la superficie del agua y es muy maniobrable.
Este robot es distinto de otros robots flotantes similares porque es el primero en valerse de la tensión superficial para mantenerse a flote, de hecho es más denso que el agua, y si se sumergiera no subiría a la superfice. Las patas de este robot se sumergen sólo de 3 a 4 mm por debajo de la superficie sin romperla, para después moverse con gran agilidad gracias a la escasa fricción que presentan las patas frente al movimiento en un desplazamiento de este tipo.
Denominan a este tipo de robot STRIDE (Surface Tension Robotic Insect Dynamic Explorer) y ninguno, presente o futuro, podrá escalarse a un tamaño mucho mayor debido a que la propia tensión superficial no puede escalarse.
El propósito que estos investigadores tenían en mente a la hora de construir el robot (además de disfrutar de la pequeña aventura y divertirse como en todo proyecto científico) era crear un modelo destinado a fines educativos y de entretenimiento, pero sugieren que podría servir para la vigilancia de parámetros medioambientales usando comunicación sin cables.
Para la creación de este prototipo los investigadores calcularon previamente que lo óptimo sería usar unos alambres hidrofóbicos recubiertos de teflón de unos 5cm de longitud que haría las veces de patas. Doce de estas patas pegadas a un cuerpo de 1 gramo de peso podrían soportar una carga de 9,3 gramos.
Para la locomoción este insecto robótico utiliza el mismo sistema que sus compañeros naturales: unas patas remeras. Pero en este caso, en lugar de músculos, tres actuadores piezoeléctricos adosados a estas patas proporcionan tanto el movimiento vertical como el horizontal adecuados para recrear el movimiento elíptico deseado. Este movimiento se amplifica mediante un resonador de frecuencia en un modo de vibración favorable.
|
|
|
El robot no ganaría, ni de lejos, a sus primos naturales, pues alcanza una velocidad de sólo 3cm/s en lugar de los 1,5 m/s de ésos, pero puede girar, rotar y moverse hacia atrás.
El movimiento superficial del agua causado por la lluvia y diversos elementos naturales o artificiales suponen una amenaza para el robot, aunque en las nuevas versiones se espera mejorar la flotabilidad frente a olas y tormentas.
En una versión del robot se sustituyeron los microactuadores por micromotores y baterías, que aunque aumentaron la masa en 6 gramos, consiguieron imprimirle una velocidad de 8,7 cm/s. Estos insectos robots son 10 veces mayores que los naturales y por eso su velocidad es muy inferior. Es de suponer que si consiguen miniaturizar más estos robots mejoren las prestaciones.
Los investigadores implicados sugieren disponer de decenas o centenares de estos insectos robots con comunicación sin hilos integrada, sensores con control autónomo y teleoperados para el estudio y seguimiento de la calidad del agua.
Referencias:
Song, Yun Seong, and Sitti, Metin. “Surface-Tension-Driven Biologically Inspired Water Strider Robots: Theory and Experiments.” IEEE Transactions on Robotics, Vol. 23, No. 3, June 2007.
Y. S. Song, S. H. Suhr and M. Sitti, «Modeling of the Supporting Legs for Designing Biomimetic Water Strider Robot,» Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, U.S.A., 2006 (pdf).
Carnegie Mellon University.
Vídeo.

2 Comentarios
RSS feed for comments on this post.
Lo sentimos, esta noticia está ya cerrada a comentarios.






lunes 23 julio, 2007 @ 10:36 am
Y también hay moscas:
http://www.technologyreview.com/Infotech/19068/
Lo que me da miedo es la implicación del departamento de defensa en el desarrollo de estos ciberbichos. Eso quiere decir que alguna de sus aplicaciones previstas no es nada buena… habrá que ir comprando matamoscas robóticos. Ya veo la propaganda: “RAID: Mata moscas, cucarachas y ¡robots!”
lunes 5 enero, 2009 @ 4:29 pm
Me parece muy interesante la temática y quisiera aportar con un link en el que se encuentran varias proyectos de desarrollo de robótica.
http://www.cvr.espol.edu.ec es el centro de visión y robótica de ESPOL